REED-E
Case Study


Background
Invasive plants threaten ecosystems by competing with native plants, spreading rapidly, and ultimately taking over natural habitats. One such plant is the common reed (Phragmites australis), which spreads quickly and harms biodiversity. Restoration and protection projects for reed-invaded wetlands face several challenges. Removing these reeds is difficult, expensive, and time-consuming. Additionally, many non-governmental organizations (NGOs) that work to protect wetlands have limited funding and volunteers. This project aims to explore an alternative way to prevent the spread of invasive reeds using robotics.
Design process

1 Interviews
As a first step to gain greater insight into the problem and to create a solution that works, members of an NGO organization that worked with invasive species were interviewed.
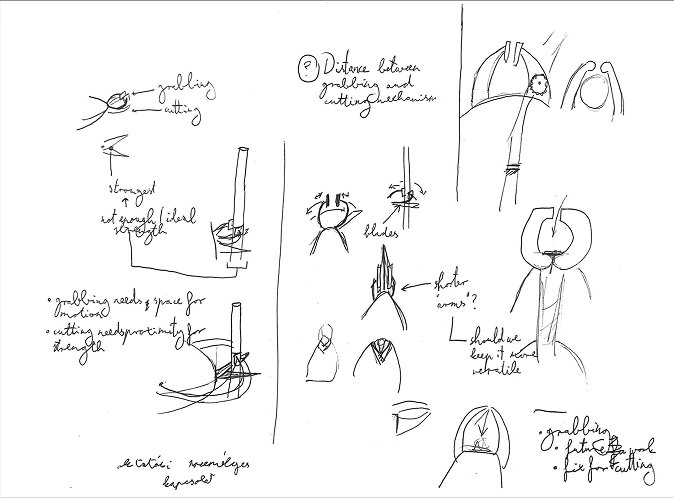
During the sketching phase, we came up with several design ideas and looked at different ways to reduce reeds, such as fire, chemicals, geotextiles, and manual cutting. We evaluated each method based on its impact on the environment, effectiveness, labor needs, and physical demands. After discussing with the NGO, we chose the best option for their needs.
We decided that a cutting mechanism is the best solution for our robot. It minimizes environmental impact, can work on its own, and has a small design. While it doesn’t fully remove the reeds, it slows their spread and reduces the hard work of manual cutting.
3 Sketching
2 Competitive Analysis
We conducted a Competitive Analysis to investigate if there were any existing robots on the market specifically designed to remove reeds. However, we found no direct examples of such solutions.


Prototype development
We developed a prototype for the cutting mechanism using laser-cut MDF parts and a conventional scissor. Gripping arms were added to stabilize the reed stem and prevent it from slipping during cutting. To avoid harming species other than reed, we explored capacitance sensors to distinguish between plants and animals. The capacitance sensor was connected to a Teensy 3.6 board with conductive copper tape around the gripping arms. Due to time constraints, we couldn't fully develop the capacitance sensor for reed identification, so we decided to combine it with photo recognition in the final prototype for safer identification.
Protoype testing
We tested the prototype's identification method with the capacitance sensor to improve the robot and ensure it only cuts invasive reeds. When we measured capacitance on both the reed and a human finger we noticed clear differences. The reed had lower capacitance values, while the human finger had higher ones.



Future work
Future work should enhance the robot's navigation, perform real-life tests, and refine its recognition and cutting mechanisms, particularly targeting reed sprouts for a more comprehensive reed control strategy.